Типовые линейные законы регулирования
Краткое резюме
Законом регулирования называют математическую зависимость, определяющую правило формирования управляющего воздействия на основе текущей ошибки системы. Наиболее часто в линейных системах автоматического регулирования используются типовые линейные законы – пропорциональный (П), интегральный (И), пропорционально-интегральный (ПИ), пропорционально-дифференциальный (ПД) и пропорционально-интегрально-дифференциальный (ПИД) законы.
Введение
Закон регулирования – это математическая зависимость, по которой регулятор формирует управляющее воздействие $X_y$ в зависимости от ошибки $e$ системы. Для линейных систем распространены именно линейные законы регулирования. Типовые законы регулирования описывают желаемую динамику регулятора и реализованы в стандартных регуляторах промышленного исполнения. В дальнейшем рассматриваются классические линейные регуляторы: пропорциональный (П), интегральный (И), сочетанные ПИ, ПД и ПИД. Для каждого законa приведены определение, передаточная функция и примечательные свойства.
Типовые регуляторы составляют основу конструирования систем автоматического управления. Их удобно сравнить по структуре, передаточным функциям и статическим/динамическим характеристикам. В табл. 1 суммированы основные параметры П-, И-, ПИ-, ПД- и ПИД-регуляторов (структура, передаточная функция, наличие статической ошибки, влияние коэффициентов и т.д.).

Из рисунка видно, что в классической схеме автоматического регулирования сравниваются задающая величина $x_з(t)$ и измеренная управляемая величина $y(t)$. Их разность формирует отклонение $e(t) = x_з(t) - y(t)$, которое поступает на вход регулятора (П, И, ПД, ПИ или ПИД). На выходе регулятора формируется управляющая величина $u(t)$, которая воздействует на объект управления. Также на объект оказывает влияние внешняя возмущающая величина $x_в(t)$. Разные типовые законы регулирования приводят к разным динамическим свойствам замкнутой системы
Пропорциональный (П) закон
П-закон (пропорциональный регулятор) формулируется так - управляющее воздействие $X_u$ пропорционально текущей ошибке $e$. Математически это записывается как:
$X_u = K_p e$,
где $K_p$ – коэффициент пропорциональности регулятора (коэффициент передачи). Передаточная функция идеального П-регулятора (отношение выход/вход) равна
$W_{\varphi}(p)=\frac{X_u(p)}{E(p)}=K_p,$
Другими словами, П-регулятор – это простое усилительное звено без динамики (безынерционное звено).
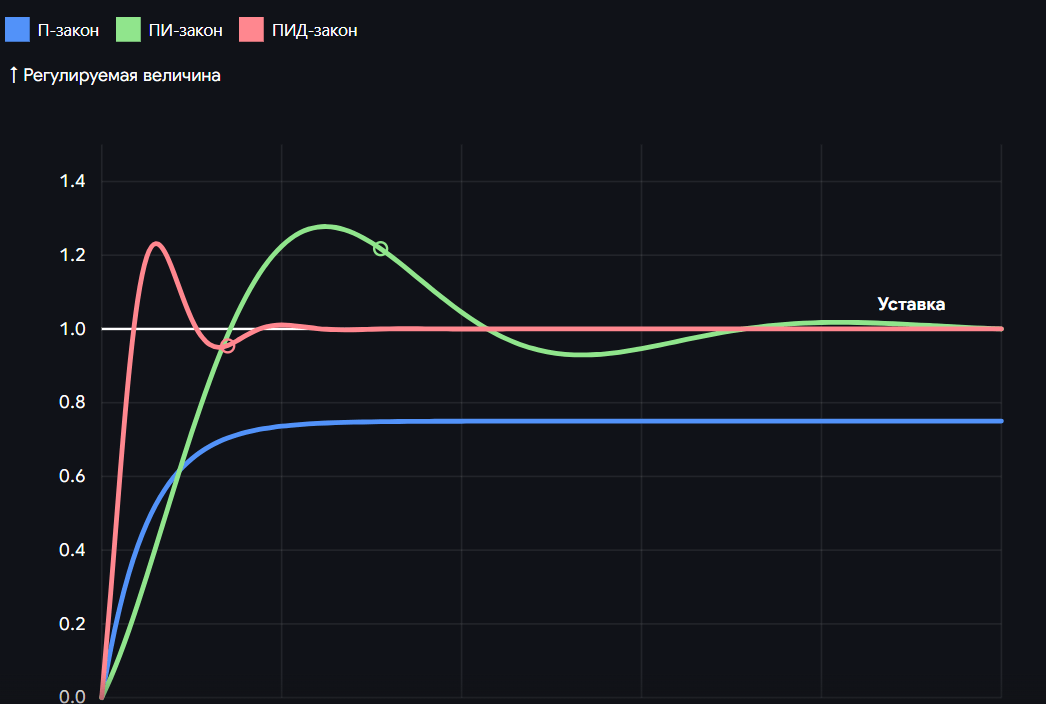
Основное свойство П-регулятора – быстрое реакция на ошибку, но при этом присутствует статическая ошибка при установившемся режиме. Классическая теория гласит: у замкнутой системы с П-регулятором будет постоянное отклонение выходной величины от задания, такое, что выходной сигнал регулятора компенсирует возмущение. Иными словами, система не сможет «добежать» до уставки: при заданном $K_p$ система установит такое $X_u$, при котором усилие на объекте равняется нагрузке, но ошибка останется ненулевой. Например, в регуляторе температуры при достижении близкого к уставке значения силы нагрева падают, пока не уравняются тепловые потери – температура стабилизируется ниже уставки. П-регулятор имеет существенный недостаток: при его использовании значение регулируемой величины никогда не стабилизируется на заданном значении из-за так называемой статической ошибки.
Чем большим коэффициент усиления, тем меньше наша статическая ошибка. Однако рост $K_p$ ведёт к увеличению колебательности системы и даже потере устойчивости при очень большом коэффициенте. У П-регулятора быстрый отклик, но остаётся постоянная ошибка при статическом объекте. П-закон обеспечивает хорошее быстродействие, но при статическом объекте управления система работает со статической ошибкой.
Пример расчёта.
Если, скажем, в цепи изменения температуры требуется усилить ошибку $e(t)$ с коэффициентом $K_p=5$, то закон регулятора задаётся $X_u = 5e$. При единичной ошибке $e=1$ выход П-регулятора составит $X_u=5$. Этот простой закон означает, что система выдаст управляющее воздействие в 5 раз больше текущей ошибки.
Интегральный (И) закон
И-закон (интегральный регулятор) формирует управляющее воздействие пропорционально интегралу ошибки по времени. Время работы интегратора часто обозначается постоянной интегрирования $T_i$.
$X_u = K_i \int_0^t e(\tau)\,d\tau$,
где $K_i$ – коэффициент регулятора. Передаточная функция И-регулятора выражается как
$W_{\varphi}(p)=\frac{X_u(p)}{E(p)}=\frac{K_i}{p} = \frac{1}{T_i p}$,
И-закон позволяет избавиться от статической ошибки по управляющему воздействию и при статическом объекте – от статической ошибки по возмущающему воздействию. Благодаря интегрированию ошибки система может в итоге «добежать» до уставки (исчезнет постоянная разность). Однако недостаток И-регулятора – очень низкая скорость реакции: система будет медленно (дрейфово) накапливать усилие. И-регулятор хорош тем, что устраняет статическую ошибку, но «быстродействие системы невысокое».
Чисто интегральный регулятор обеспечивает нулевой статический остаток (при подходящей настройке), но при этом система становится очень вялой. На практике И-закон редко применяется сам по себе – обычно его добавляют к П-закону.
Пропорционально-интегральный (ПИ) закон
ПИ-закон – сочетание пропорциональной и интегральной составляющих. Управляющее воздействие регулятора записывается как сумма: $X_u = K_p e + K_i\int_0^t e(\tau)\,d\tau$.
$X_u = K_p\,e + K_i\int_0^t e(\tau)\,d\tau = K_p\Bigl(e + \frac{1}{T_i}\int_0^t e(\tau)\,d\tau\Bigr)$.
Передаточная функция комбинированного регулятора получается суммой:
$W_{\varphi}(p)=K_p + \frac{K_i}{p} = K_p\Bigl(1 + \frac{1}{T_i p}\Bigr) = \frac{K_p (T_i p + 1)}{T_i p}$
ПИ-закон сочетает положительные свойства систем с П-законом и И-законом, поэтому обеспечивает хорошее быстродействие и отсутствие статических ошибок. На практике ПИ-регулятор – один из наиболее универсальных и широко применяемых.
Например, в температурных системах ПИ-регулятор обеспечивает быстрый подъём температуры к уставке и практически полный сброс статической погрешности (резкий скачок мощности сменяется плавной нарастанием интегральной части). И-составляющая нужна для устранения статической ошибки, характерной для пропорционального регулятора.
Пропорционально-дифференциальный (ПД) закон
ПД-закон включает пропорциональную и дифференциальную составляющие (без интегральной).
$X_u = K_p e + K_d \frac{de}{dt} = K_p\Bigl(e + T_d\frac{de}{dt}\Bigr)$
где $K_d$ – коэффициент дифференцирования.
Передаточная функция равна:
$W_{\varphi}(p)=K_p + K_d p = K_p(1 + T_d p)$
Добавление дифференциального звена позволяет реагировать на скорость изменения ошибки. ПД-регулятор улучшает устойчивость и снижает колебательность системы, подавляет колебательность и даёт фазовый запас на высоких частотах. Однако в силу отсутствия интегральной составляющей постоянная ошибка при выходе объекта останется, не позволяя избавиться полностью от статических ошибок. Другими словами, ПД-регулятор быстрее П и устойчивее, но статический остаток сохраняется. ПД-регуляторы применяют для систем со значительными запаздываниями или быстро изменяющимися возмущениями – например, для теплообменников или систем с частой и быстрой сменой нагрузки. Их назначение – придать системе некоторое упреждение, повышая быстродействие и стабильность.
Пропорционально-интегрально-дифференциальный (ПИД) закон
ПИД-закон объединяет все три составляющие:
$X_u = K_p e + K_i\int_0^t e(\tau)\,d\tau + K_d \frac{de}{dt}$
Передаточная функция:
$W_{\varphi}(p)=K_p + \frac{K_i}{p} + K_d p$
может быть представлена как $K_p[1 + 1/(T_i p) + T_d p]$. PID-регулятор сочетает достоинства всех предыдущих: устраняет статическую ошибку (благодаря интегралу), даёт быстрый отклик и подавляет перерегулирование (за счёт дифференциала). ПИД-регулятор – самый сбалансированный из всех регуляторов широко применяется в различных сферах. Например, в ПИД-регуляторе пропорциональная часть быстро реагирует на ошибку, интегральная устраняет остаточную погрешность, а дифференциальная прогнозирует отклонение и уменьшает максимальную амплитуду в переходном процессе.
Однако у ПИД-закона есть и сложные моменты: дифференциальная составляющая резко реагирует на шум и помехи, что может вызвать «колебательный процесс» при грубых возмущениях. Выбор времени дифференцирования $T_d$ должен проводиться внимательно. Для большинства практических задач ПИД-регулятор остаётся стандартным инструментом регулирования за счёт своего оптимального баланса быстродействия и точности.
Сравнение типовых законов регулирования
В табл. 1 приведены основные характеристики типовых регуляторов. Для каждого закона указаны структура (из чего состоит регулятор), передаточная функция, наличие статической ошибки, влияние ключевых коэффициентов, область применения и достоинства/недостатки.
Таблица 1. Сравнение типовых линейных законов регулирования
| Закон | Математическая модель | Передаточная функция Wφ(p) | Статическая ошибка, устойчивость | Область применения, особенности |
| П | $X_u = K_p e$ | $K_p$ | Есть статическая ошибка (для стационарного объекта); быстрый отклик; устойчивость ухудшается при большом $K_p$. | Простые системы, когда ошибку можно допустимо не устранить; используется как базовый усилитель. |
| И | $X_u = K_i\int e\,dt$ | $K_i/p = 1/T_i p$ | Статическая ошибка отсутствует (система выходит к уставке); отклик очень медленный, может быть неустойчивым для высоких порядков. | Системы, где требуется нулевая ошибка, и допустима медленная динамика; обычно в сочетании с П ($\Rightarrow$ ПИ). |
| ПИ | $X_u = K_p e + K_i\int e\,dt$ | $K_p + K_i/p$ | Ошибка устранена; быстродействие существенно лучше, чем у чистого И. Появляется 2-й порядок системы, возможны затухающие колебания при слишком большом $K_i$. | Универсальный регулятор для широкого класса систем; устраняет статическую ошибку и обеспечивает хорошее быстродействие. |
| ПД | $X_u = K_p e + K_d \dot e$ | $K_p + K_d p$ | Статическая ошибка присутствует (как у П); устойчивость улучшается, осцилляции снижаются. Частотная характеристика даёт фазовый запас. | Системы со значительным запаздыванием или резкими помехами; уменьшает перерегулирование, применяют при необходимости фазы. |
| ПИД | $X_u = K_p e + K_i\int e\,dt + K_d \dot e$ | $K_p + K_i/p + K_d p$ | Ошибка устранена, колебательность минимальна, быстродействие высокое. Система хорошо сбалансирована. | Практически все следящие системы, когда требуются высокая точность и скорость. Широко применяется в промышленности. |
Примеры и практические замечания
Рассмотрим несколько практических ситуаций выбора закона регулирования. Если важно максимально быстро достичь цели и допускается небольшая постоянная ошибка, выбирают П-закон (усилитель). Если же ошибка должна быть минимальна (нулевой), обязательно нужен И-закон. На практике практически всегда используют комбинированные регуляторы: ПИ-закон или ПИД-закон. ПИ-регулятор устраняет ошибку без сложностей дифференцирования, и его настраивают, исходя из требуемого компромисса скорости и перерегулирования.ПИ-регулятор учитывает предыдущую историю изменения входной величины и учится на опыте, что делает систему точной при приемлемом быстродействии.
Пример подбора
Допустим, в системе автоматического управления необходимо убрать остаточную ошибку и получить умеренное быстродействие. Выбирают ПИ-регулятор. Начинают с небольшого $K_i$ (слабая интегральная составляющая), подбирают $K_p$ так, чтобы переходный процесс был быстро затухающим. Если требуется увеличить скорость – можно повысить $K_p$, но при этом возрастёт перерегулирование. Увеличение $K_i$ уменьшит переходное время к установке, но при этом система может начать колебаться из-за 2-го порядка регулятора. Подбор ПИ-регулятора обычно проводится методом проб и ошибок или автоматического синтеза.
Практические замечания
В задачах управления промышленными объектами учитывают и ограничения регулятора. Например, чистый П-регулятор обычно реализуется как усилитель с заданным коэффициентом. Современные регуляторы (ПЛК-регуляторы) позволяют программно реализовать П, И, Д составляющие. При использовании ПИД-регулятора часто добавляют фильтр при вычислении производной, чтобы снизить чувствительность к шуму. Если вход регулятора зашумлён, дифференциальная составляющая в миг приведёт систему к расходящемуся процессу, поэтому на практике реализуют плавное «сглаживание» или ограничивают $K_d$.
При проектировании систем контроля важно правильно ставить вопросы: требуется ли полное устранение ошибки и насколько велико время регулирования. Необходимо оценить, важно ли нам получить статическую ошибку, равную нулю. Ответ на этот вопрос определяет выбор базового закона регулирования.
Выводы
Типовые линейные законы регулирования – основа теории и практики автоматического управления. Каждому закону соответствует своя передаточная функция и поведенческие характеристики. П-закон даёт быстрый отклик, но статическую ошибку. И-закон устраняет ошибку, но замедляет систему. Сочетания ПИ, ПД, ПИД позволяют получить компромисс: комбинированные регуляторы обеспечивают высокую точность с управляемым быстродействием и минимальным перерегулированием. Выбор конкретного закона зависит от требований к статической погрешности и динамике системы.